AI and Sustainability
Using AI for the development of sustainable resource projects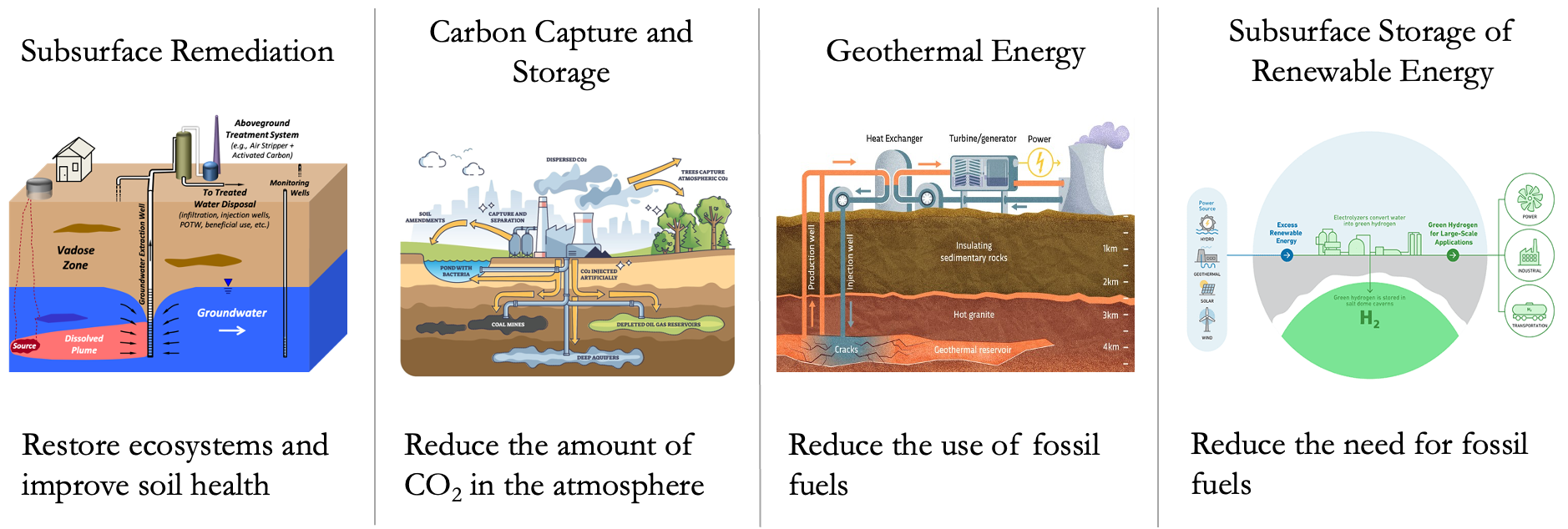

Using AI for the development of sustainable resource projects
Innovations in solving POMDPs with large state, action, and observation spaces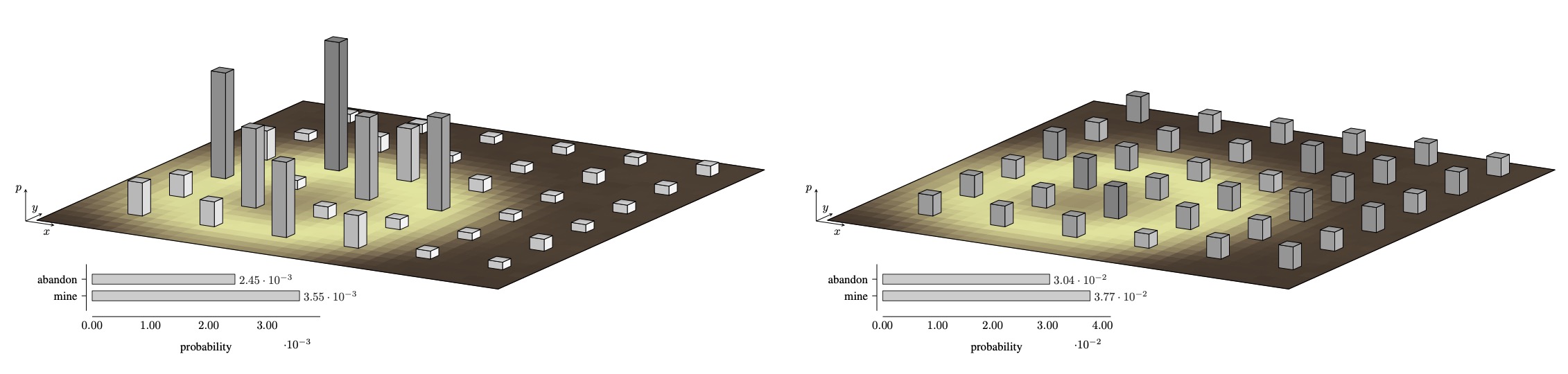
Using formal and approximate techniques to validate safety-critical autonomy